ZiptieAI evolution
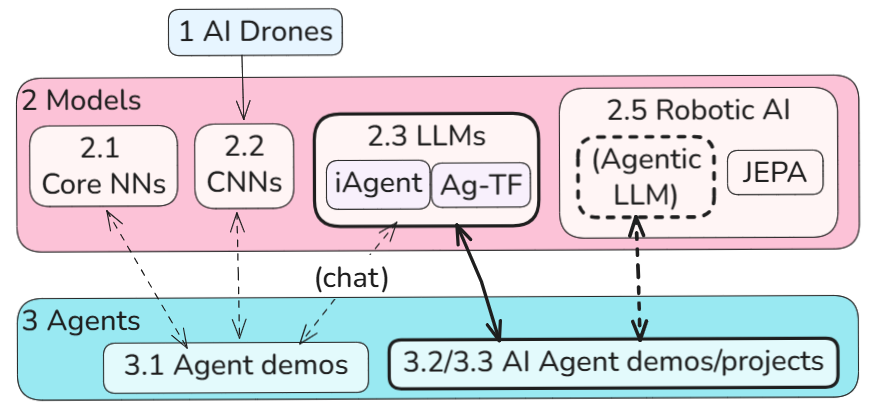
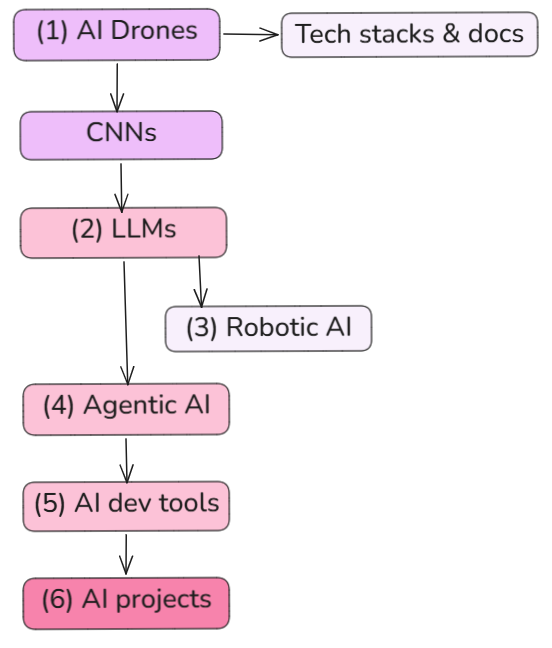
The diagram below (v7) summarizes ZAI evolution:
- 1 AI drones were the first project. The AI was CNNs (object recognition).
- 2 AI models:
- 2.1 Core NNs were next. Simple input/output “bare bones” NNs that you can train and run locally.
- 2.2 CNNs (convoluted NNs for object recognition). The main AI used on drones.
- 2.3 LLMs (with internal agent and transformer (TF)). The TF performs a similar process to convolution using “attention heads”, which basically “convolute” tokens related by meaning.
- 2.5 Robotic AI (includes LLMs and JEPA). I worked on JEPA for a while, and was not impressed. The idea of being anywhere near a robot that is in any way controlled by JEPA or an LLM is scary (just like FSD in cars).
- 3 Agents:
- 3.1 Agent demos (non-AI) are classical control loops (written in Python, etc). They might use a model, but not for any control inputs.
- 3.2 AI agent demos are basic demos that use AI for control input. This is tricky because (1) you can’t predict 100% LLM responses and (2) the control needs predictable responses.
- 3.3 AI agent projects are meant to be working prototype projects (not simple demos).
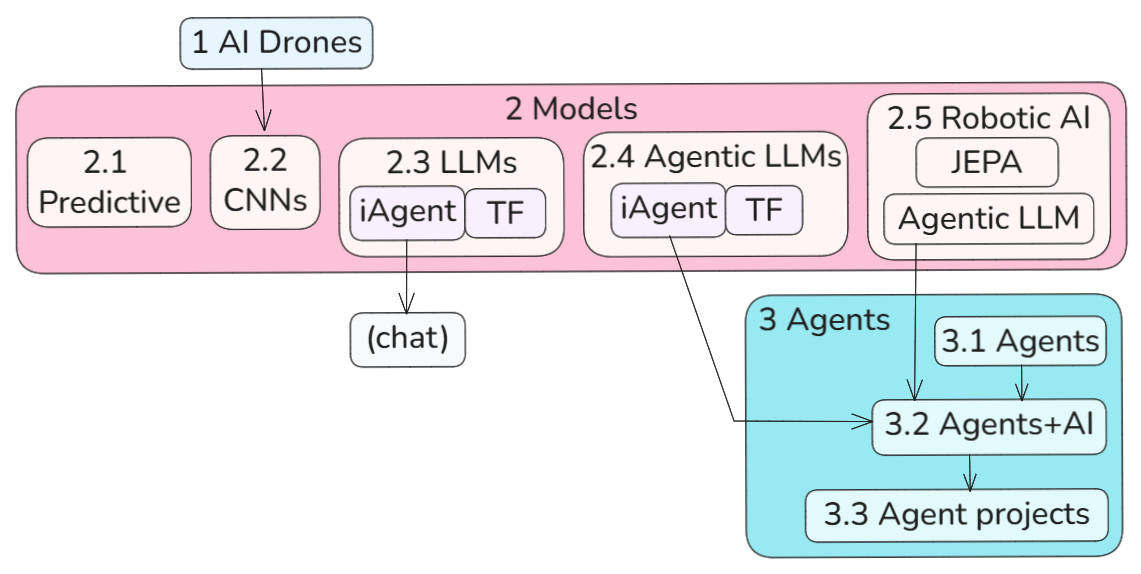
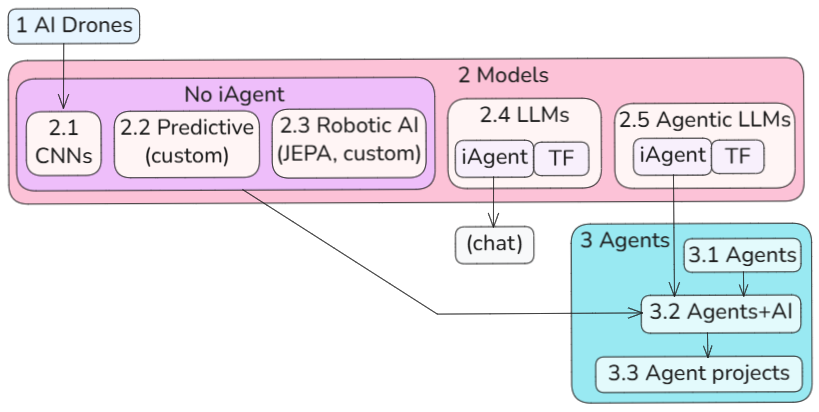
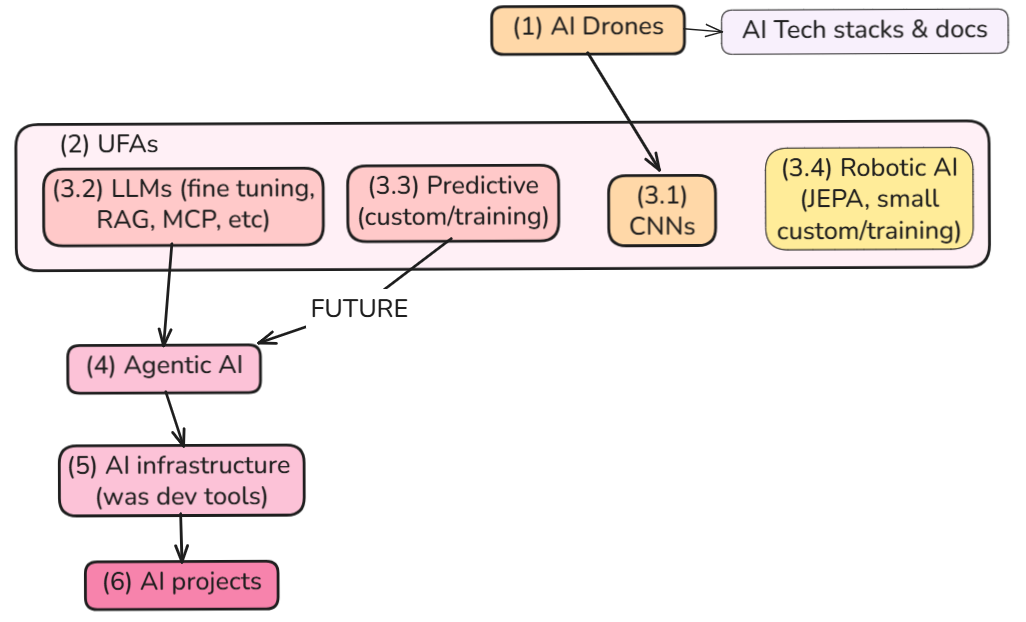
Previous versions of this diagram.
v6
v5
v3
v2
v1
26.0527 (v1 26.0523)