2 NNs
You control the mathematics.
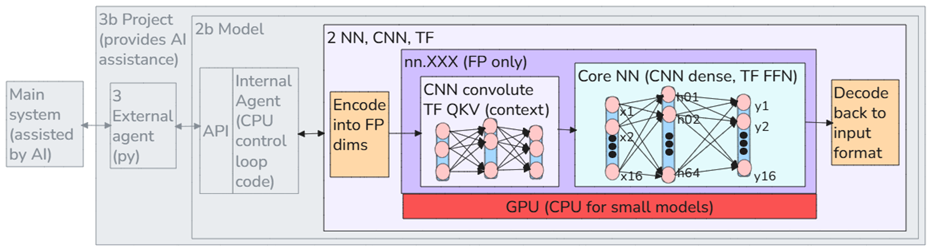
2 NNs in the master diagram
TOC
- 2.0 Concepts
- 2.1 Core NNs
- 2.2 Convolution
- 2.3 Transformers (TFs)
- 2.5 Robotic AI NNs
- 2.7 TF training algorithms (TODO)
2.0 Concepts
The core of every model is the NN that implements a UFA (Univeral Function Approximator) that generates an output based on pattern matching of the input. The patterns were programmed (“trained”) by setting NN parameters (weights and biases) during training.
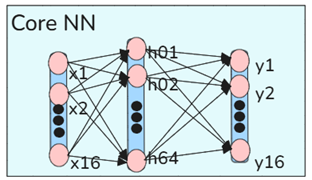
2.1 Core NNs
Small NNs for specific tasks. Includes DIY demos that give you a real understanding of the core of NNs.
- D1: 2.1.1 Predictive NN 01 sine (D1) (26.0524-25)
- D2: 2.1.2 Tiny classifier NN (D2) (26.0524-25)
- D3: 2.1.3 Tiny classifier NN on Render (D3) (26.0527)
- D6 2.1.4 Pattern detector NN (26.0604)
- D7: 2.1.5 Anomaly detector NN (26.0605)
- D8: 2.1.6 Forecasting NN (26.0605) (also D8b: 2.1.6 Forecasting NN noisy)
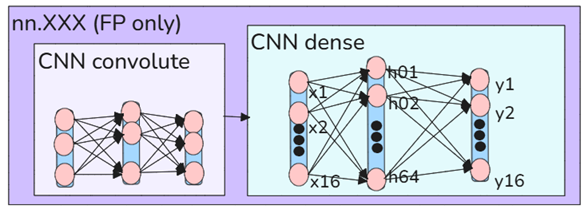
2.2 CNNs (convolution)
A CNN computes the most probable label (“dog”, “airplane”, etc) for a set of pixels. Studying CNNs is great preparation for studying more complex LLMs.
- D4: 2.2.1 D4 CNN image classifier (26.0528)
- D4b: 2.2.1b D4 CNN algorithm details (26.0528)
- D9: 2.2.2 D9 CNN defect detector (26.0606)
- D10: 2.2.3 D10 CNN feature map visualization (26.0606)
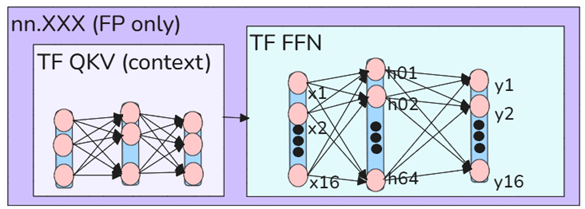
2.3 TFs (transformers)
An LLM (1) inputs a sequence of tokens, (2) computes the probabilities of all vocabulary tokens as the next token, (3) outputs the selected new token, and finally (4) adds the new token to the next input sequence. An LLM consists of an (1) internal agent and a (2) transformer (TF) NN. The TF is the core computational engine behind modern AI systems and the mechanism that enables modern LLM behavior.
- D5: 2.3.1 D5 Tiny TF (26.0529)
- D5b: 2.3.1b D5 tiny TF algorithm details (26.0602)
- D11: 2.3.11 Tiny TF classifier
- D12: 2.3.12 Tiny TF sentiment detector
- D13: 2.3.13 Tiny TF sequence predictor
2.5 Robotic AI NNs
I no longer believe LeCun’s hype about his version of JEPA that will supposedly be a fundamentally different type of AI platform (that fixes the fundamental limitations of LLMs; it doesnt, and never will). I have put this section on pauses. *Robotic AI (that claims to be able to do what humans can do) is about as realistic as LLM intelligence, FSD, or colonizing Mars.
See the Wiki page for list of demos.
A Waymo “self-drives” into a flooded street.

2.7 Training algorithms
TODO
26.0616 (v1 26.0526)