(1) AI drones
See the Wiki page for more info.
I worked on AI drones from 2023 to 2024 focusing on:
- Drone simulation
- FPV and Pixhawk drone builds
- AI (object recognition using Jetson Nano and PI4)
- Drone AI / autonomous flight (Pixhawk drone with Jetson Nano using object recognition with Pymavlink for flight control inputs)
See also:
The inspiration for “Ziptie” drones
The original idea for the “Ziptie” part of “ZiptieAI” came from the zipties the Ukrainian army uses for their very flexible and mission ready drones.

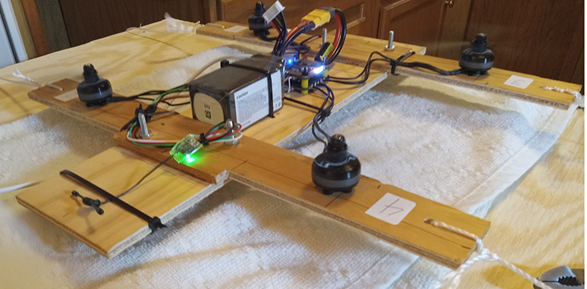
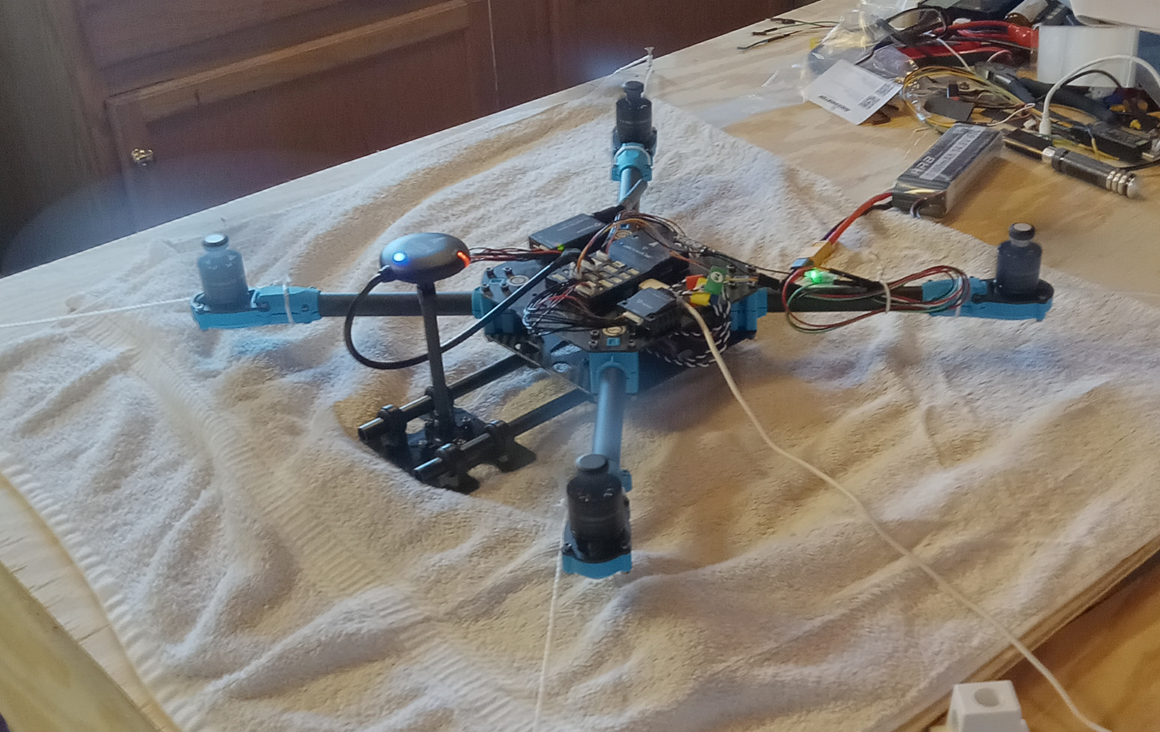
My first flight tests
were in my kitchen (with remote control, although very limited altitude). My first drone (left) was an FPV drone (shown with initial test frame), the second drone (right) was an x500 with PX4 on 24.0505.
My original project plan
is shown below. I completed parts 1-4, and then got distracted by LLMs and agentic AI.
| Wiki project part (stage) | Activities |
|---|---|
| Part 1 Simulation | Total simulation (of the drone, world, camera, etc) |
| Part 2 AI on CC | AI on a companion computer (Nano, PI4/5) or Ubuntu PC focusing on object recognition / detection |
| Part 3 Real FC | Simulation again, but using a real FC |
| Part 4 Basic platform build | Building a Pixhawk (large Holybro X500) drone and an FPV (small SpeedyBee) drone |
| Part 5 Mission platform dev | (not completed) STM32 tools, FC FW dev / API’s, ROS, and stealth (wired) |
| Part 6 Mission platforms | (not started) Specific mission platforms (such as mine clearance, target lock-on) |
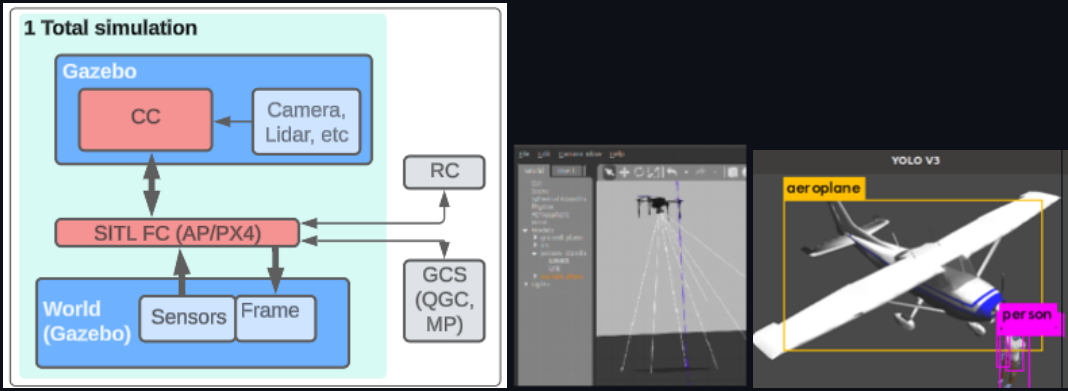
Wiki part 1: Simulation
In this part 1 (Gdrive) all components are simulated (including the world). This kind of simulation is valuable because
- The flight computer (FC) controls all surfaces (just the rotors). Simple Mavlink commands are sent to FC to fly the copter. Therefore copter reaction to flight commands can be simulated accurately.
- Ground control stations (QGC, MP) are computer based anyway. The CC (mission, companion computer) runs several protocols (ROS, MAVROS, MAVLINK, MAVPROXY) that can be simulated accurately.
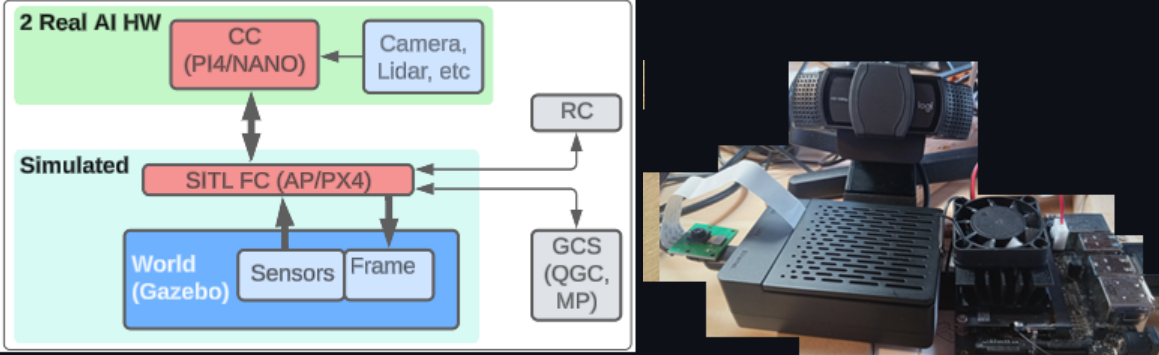
Wiki part 2: Types of AI apps / companion computers
In this part 2 (Gdrive) a real CC (companion computer, PI4/Nano) is used (all other components and the world are simulated). My real focus (at least at first) was AI. I just wanted to use a simple quadcopter as a platform for the AI equipment. I wanted (in the future) to summarize the AI app / CC combinations.
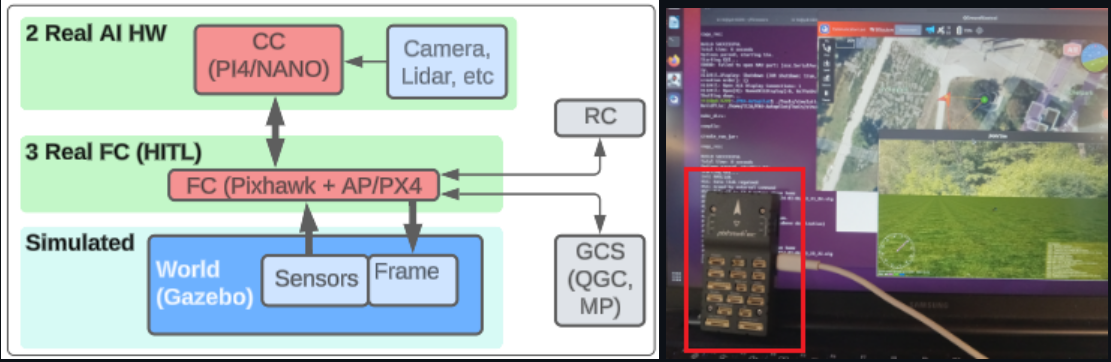
Wiki part 3: FC HITL (hardware in the loop
Shows how to test a real FC with everything else simulated. I original thought simulation would greatly help in preparing for the first flight, but it did not, mainly because
- Simulations very complicated to setup.
- The biggest problems with the first flight were not problems during simulation, including the
- Many errors and bugs that did not appear during simulation.
- Excess complexity of setting up the connection between
- RC (with the sticks),
- Rx (receiver on the copter), and
- FC
Wiki part 4: Basic platform build (FPX and Pixhawk)
Focuses on the FC/firmware combinations shown below (with status).
| Firmware | Pixhawk (6c) | FPV STM32 (SBee F405v3) |
|---|---|---|
| Ardupilot | (almost) | (almost) |
| PX4 | Working | |
| Betaflight | Working | |
| INAV | Working |
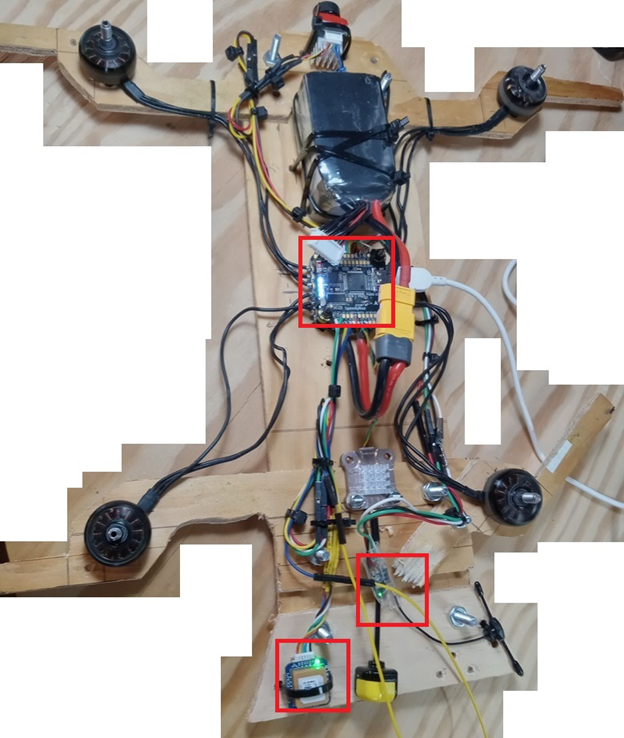
FPV build (a bit messy)

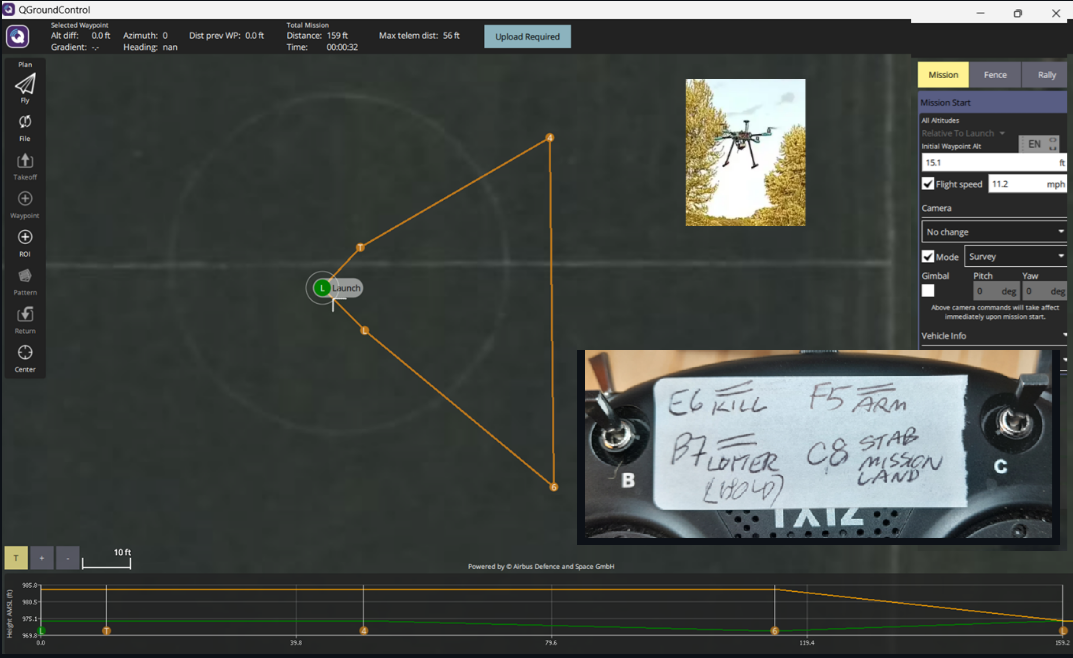
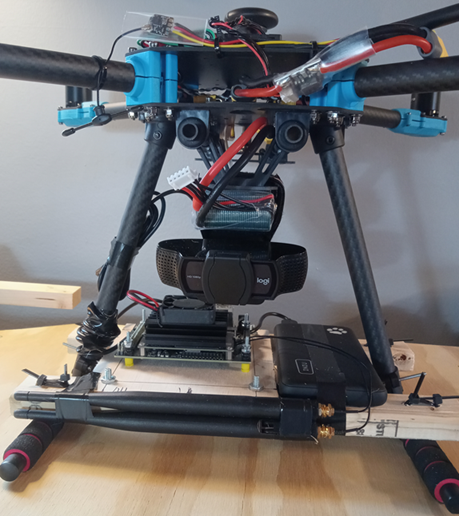
Pixhawk AI build flight test and build design (unfortunately there are basically no field pics)
26.0425 TODO: Tridgewell